确定最佳行程成本网络
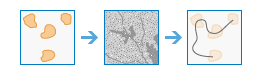
该工具用于根据一组输入区域计算最佳成本网络。
此工具的示例应用之一是查找急救车辆的最佳网络。
如果选中 使用当前地图范围,则仅分析当前地图范围中可见的输入图层中的位置。如果未选中,则将分析输入图层中的所有位置,包括超出当前地图范围的位置。
选择栅格或要素位置图层以确定其间的行程路径
要通过最低成本网络连接的输入区域。
区域可以通过影像服务或要素服务来定义。
对于影像服务,将通过值相同的连续(邻近)像元组定义区域。每个区域必须具有唯一的编号。不属于任何区域的像元一定是 NoData。栅格类型必须为整型,值可正可负。
对于要素服务,输入可以为点、线或面。
选择行程成本栅格图层
定义以平面测量的经过每个像元所需的阻抗或成本。
每个像元位置上的值表示经过像元时移动每单位距离所需的成本。每个像元位置值乘以像元分辨率,同时也会补偿对角线移动来获取经过像元的总成本。
成本栅格的值可以是整型或浮点型,但不可以为负值或零(不存在负成本或零成本)。
结果最佳路径折线图层名称
将在 我的内容中创建并添加到地图中的图层的名称。默认名称基于工具名称以及输入图层名称。如果该名称的图层已存在,则系统将提示您提供其他名称。
您可以使用 将结果保存在下拉框指定 我的内容中的文件夹名称,结果将保存到该文件夹中。
结果相邻路径折线图层名称
将在 我的内容中创建并添加到地图中的图层的名称。默认名称基于工具名称以及输入图层名称。如果该名称的图层已存在,则系统将提示您提供其他名称。
您可以使用 将结果保存在下拉框指定 我的内容中的文件夹名称,结果将保存到该文件夹中。