Optimum Seyahat Maliyeti Ağını Belirle
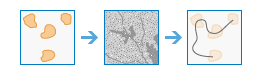
Bu araç, bir dizi girdi bölgesinden optimum maliyet ağını hesaplar.
Bu aracın örnek uygulanışlarından biri, acil durum araçları için en iyi ağı bulmaktır.
Geçerli harita yayılımını kullan işaretli ise, yalnızca geçerli harita yayılımında görünür olan girdi katmanındaki konumlar analiz edilir. İşaretli değilse, girdi katmanındaki tüm konumlar, geçerli harita yayılımının dışında bile olsa analiz edilir.
Şunların arasındaki seyahat yollarını belirlemek için raster veya detay konumu katmanı seçin
En düşük maliyetli ağ ile bağlanacak olan girdi bölgeleri.
Bölgeler, bir görüntü servisi veya detay servisi tarafından tanımlanabilir.
Görüntü servisi için bölgeler, aynı değere sahip bitişik (komşu) hücrelerden oluşan gruplar tarafından tanımlanır. Her bölge benzersiz bir şekilde numaralandırılmalıdır. Herhangi bir bölgenin parçası olmayan hücreler Verisiz olmalıdır. Raster türü tam sayı olmalıdır ve değerler pozitif veya negatif olabilir.
Detay servisi için girdi nokta, çizgi veya çokgen olabilir.
Seyahat maliyeti raster katmanı seçin
Her bir hücrenin içinden planimetrik olarak hareket etmek için empedansı ya da maliyeti tanımlayan bir raster.
Her hücre konumundaki değer, hücre içinde hareket etmek için birim başına maliyet mesafesini temsil eder. Her hücre konumu değeri hücre çözünürlüğü ile çarpılırken, aynı zamanda hücre içinden geçmenin toplam maliyetini elde etmek için çapraz (diyagonal) hareketi dengeler.
Maliyet rasterının değerleri tamsayı veya kayan nokta olabilir, ancak negatif veya sıfır olamaz (negatif veya sıfır maliyete sahip olamazsınız).
Sonuç optimum yol çoklu çizgi katmanı adı
İçeriğim'de oluşturulacak ve haritaya eklenecek katmanın adı. Varsayılan ad, araç adına ve girdi katmanı adına dayanır. Katman zaten mevcutsa, başka bir ad sağlamanız istenir.
İçeriğim’de, Sonuçları Kaydet açılır kutusunu kullanarak sonucun kaydedileceği klasörün adını belirleyebilirsiniz.
Sonuç komşu yol çoklu çizgi katmanı adı
İçeriğim'de oluşturulacak ve haritaya eklenecek katmanın adı. Varsayılan ad, araç adına ve girdi katmanı adına dayanır. Katman zaten mevcutsa, başka bir ad sağlamanız istenir.
İçeriğim’de, Sonuçları Kaydet açılır kutusunu kullanarak sonucun kaydedileceği klasörün adını belirleyebilirsiniz.