กำหนดโครงข่ายต้นทุนการเดินทางที่ดีที่สุด
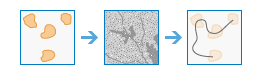
เครื่องมือนี้คำนวณโครงข่ายต้นทุนที่ดีที่สุดจากชุดของส่วนอินพุต
ตัวอย่างหนึ่งของการใช้เครื่องมือนี้คือการค้นหาโครงข่ายที่ดีที่สุดสำหรับรถฉุกเฉิน
ถ้า ใช้ขอบเขตแผนที่ปัจจุบัน ถูกเลือก เฉพาะตำแหน่งเหล่านั้นในชั้นข้อมูลอินพุึตที่มองเห็นได้ ที่อยู่ในขอบเขตแผนที่ปัจจุบันนี้เท่านั้น จะถูกวิเคราะห์ หากไม่เลือก ตำแหน่งทั้งหมดในชั้นข้อมูลอินพุตจะถูกนำมาวิเคราะห์ ถึงแม้ว่าข้อมูลเหล่านั้นจะอยู่นอกขอบเขตแผนที่ปัจจุบัน
เลือกแรสเตอร์ของชั้นข้อมูลตำแหน่งของฟีเจอร์เพื่อคำนวณเส้นทางการเดินทางระหว่าง
ส่วนของอินพุตที่เชื่อมต่อโดยโครงข่ายที่มีต้นทุนน้อยที่สุด
กำหนดส่วนได้จากบริการข้อมูลภาพหรือฟีเจอร์เซอร์วิส
สำหรับบริการข้อมูลภาพ ส่วนจะถูกกำหนดขึ้นด้วยกลุ่มของเซลล์ต่อเนื่อง (ติดกัน) ของค่าเดียวกัน แต่ละส่วนต้องมีตัวเลขเฉพาะ เซลล์ที่ไม่ได้เป็นส่วนหนึ่งของส่วนใด ๆ จะเป็น NoData ประเภทของแรสเตอร์ต้องเป็นจำนวนเต็ม และค่าอาจเป็นค่าบวกหรือค่าลบก็ได้
สำหรับฟีเจอร์เซอร์วิส อินพุตอาจเป็นจุด เส้น หรือหลายเหลี่ยม
เลือกชั้นข้อมูลแรสเตอร์ค่าเดินทาง
แรสเตอร์ที่กำหนดอิมพีแดนซ์หรือต้นทุนเพื่อย้ายผ่านแต่ละเซลล์
ค่า ณ ตำแหน่งแต่ละเซลล์แทนระยะทางต้นทุนต่อหน่วยในการเคลื่อนผ่านเซลล์ ค่า ณ ตำแหน่งแต่ละเซลล์จะถูกคูณด้วยความละเอียดเซลล์ พร้อม ๆ กับชดเชยการเคลื่อนที่ในแนวทแยงเพื่อแสดงต้นทุนโดยรวมของการเคลื่อนผ่านเซลล์
ค่าของแรสเตอร์ต้นทุนอาจเป็นจำนวนเต็มหรือจุดลอย แต่ไม่สามารถเป็นค่าลบหรือศูนย์ (คุณไม่สามารถมีต้นทุนเป็นค่าลบหรือศูนย์)
ชื่อชั้นข้อมูลเส้นรอบเส้นทางที่ดีที่สุดของผลลัพธ์
ชื่อของชั้นข้อมูลที่จะถูกสร้างขึ้นใน เนื้อหาของฉัน และเพิ่มไปยังแผนที่ ชื่อเริ่มต้นจะขึ้นอยู่กับชื่อเครื่องมือและชื่อชั้นข้อมูลอินพุต ถ้าชั้นข้อมูลนี้มีอยู่แล้ว คุณจะถูกขอให้ตั้งชื่อใหม่
คุณสามารถระบุชื่อโฟลเดอร์ใน My Content ที่ผลลัพธ์จะบันทึกโดยการใช้ กล่อง drop-down บันทึกผลใน
ชื่อชั้นข้อมูลเส้นรอบเส้นทางใกล้เคียงของผลลัพธ์
ชื่อของชั้นข้อมูลที่จะถูกสร้างขึ้นใน เนื้อหาของฉัน และเพิ่มไปยังแผนที่ ชื่อเริ่มต้นจะขึ้นอยู่กับชื่อเครื่องมือและชื่อชั้นข้อมูลอินพุต ถ้าชั้นข้อมูลนี้มีอยู่แล้ว คุณจะถูกขอให้ตั้งชื่อใหม่
คุณสามารถระบุชื่อโฟลเดอร์ใน My Content ที่ผลลัพธ์จะบันทึกโดยการใช้ กล่อง drop-down บันทึกผลใน