Pronađi klastere tačaka
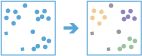
Ova alatka pronalazi klastere tačkastih geoobjekata sa okružujućom bukom na osnovu njihove prostorne distribucije.
Ako je opcija Koristi trenutni obuhvat mape izabrana, biće analizirani samo oni geoobjekti iz ulaznog tačkastog sloja koji su unutar trenutnog obuhvata mape. Ako nije izabrana, analiziraće se svi geoobjekti u ulaznom tačkastom sloju, čak i ako su izvan trenutnog obuhvata mape.
Odaberite sloj za koji će klasteri da budu pronađeni
Tačkasti sloj na kom će biti pronađeni klasteri.
Minimalan broj tačaka koje se smatraju klasterom
Minimalni broj geoobjekata za početnu vrednost klastera. Bilo koji klaster sa manje geoobjekata od navedenog, biće smatran kao buka.
Ograničite opseg pretrage na (opciono)
Maksimalno rastojanje između geoobjekata za koje se smatra da su delovi istog klastera. Ako se ostavi prazno, alat će pokrenuti HDBSCAN, koji koristi promenljiva rastojanja za odvajanje klastera promenljivih gustina od ređeg šuma. Ako je data vrednost, alat će pokrenuti DBSCAN, koji koristi navedeno rastojanje za odvajanje gustih klastera od ređeg šuma.
Naziv sloja sa rezultatima
Ovo je naziv sloja koji će biti kreiran u Mom sadržaju i dodat na mapu. Podrazumevani naziv je zasnovan na nazivu alatke i nazivu ulaznog sloja. Ako naziv sloja već postoji, bićete upitani da unesete drugi naziv.
Koristeći padajući meni Sačuvaj rezultat u, možete da navedete ime fascikle u Mom sadržaju u kojoj će rezultat biti sačuvan.