Encontrar Clusters de Ponto
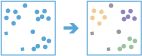
Esta ferramenta encontra clusters de elementos de pontos no ruido circundante com base na sua distribuição espacial.
Se a opção Utilizar extensão de mapa atual estiver selecionada, apenas os elementos presentes na camada de pontos de entrada, na atual extensão de mapa, serão analisados. Se não marcar a opção, serão analisados todos os elementos na camada de pontos de entrada, mesmo que estejam fora da extensão atual do mapa.
Selecione a camada a partir da qual os clusters serão encontrados.
A camada de pontos en que se encontrarão os clusters.
Número mínimo de pontos para ser coniderado um cluster
O número mínimo de elementos para ser considerado um cluster. Qualquer cluster com menos elementos do que os definidos serão considerados ruído.
Limitar o intervalo de pesquisa para (opcional)
A distância máxima para considerar elementos como parte do mesmo cluster. Se deixado em branco, a ferramenta executará HDBSCAN, que utiliza várias distâncias para separar agrupamentos de várias densidades de ruído reduzido. Se deixado em branco, a ferramenta executará DBSCAN, que utiliza uma distância específica para separar agrupamentos densos de ruído reduzido.
Nome da camada resultante
Este é o nome da camada que será criada em O Meu Conteúdo e adicionada ao mapa. O nome padrão é baseado no nome da ferramenta e do nome da camada de entrada. Se o nome da camada já existir, ser-lhe-á pedido que introduza outro nome.
Ao utilizar o menu suspenso Guardar resultado em pode definir o nome da pasta em O Meu Conteúdo onde o resultado será guardado.