Znajdź klastry punktów
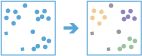
To narzędzie znajduje klastry obiektów punktowych wśród otaczającego szumu w oparciu o ich rozkład przestrzenny.
Jeśli opcja Użyj bieżącego zasięgu mapy jest zaznaczona, analizowane będą tylko obiekty w wejściowej warstwie punktowej widoczne w bieżącym zasięgu mapy. Jeśli opcja ta nie jest zaznaczona, przeanalizowane zostaną wszystkie obiekty w wejściowej warstwie punktowej, nawet jeśli znajdują się one poza bieżącym zasięgiem mapy.
Wybierz warstwę, dla której mają zostać znalezione klastry
Warstwa punktowa, w której będą wyszukiwane klastry.
Minimalna liczba punktów, które są uznawane za klaster
Minimalna liczba obiektów, które są uznawane za klaster. Każdy klaster o mniejszej niż zdefiniowana liczbie obiektów zostanie uznany za szum.
Ogranicz zakres wyszukiwania do (opcjonalnie)
Maksymalna odległość pozwalająca uznać obiekty za część tego samego klastra. Jeśli dla tej opcji nie podano wartości, w narzędziu zostanie uruchomiony proces HDBSCAN, który rozdziela klastry o różnej gęstości od rzadszego szumu przy użyciu różnych odległości. Jeśli wartość jest podana, w narzędziu zostanie uruchomiony proces DBSCAN, który rozdziela gęste klastry od rzadszego szumu przy użyciu podanej odległości.
Nazwa warstwy wynikowej
Jest to nazwa warstwy, która zostanie utworzona w zakładce Moje zasoby i zostanie dodana do mapy. Nazwa domyślna jest tworzona w oparciu o nazwę narzędzia i nazwę warstwy wejściowej. Jeśli ta nazwa warstwy już istnieje, wyświetlona zostanie prośba o podanie innej nazwy.
Używając menu rozwijanego Zapisz wynik w, można wskazać nazwę folderu na stronie Moje zasoby, w którym zostanie zapisany wynik.