최적 이동 비용 네트워크 결정(Determine Optimum Travel Cost Network)
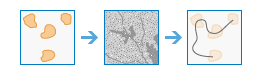
이 도구는 입력 지역의 집합으로부터의 최적 비용 네트워크를 계산합니다.
이 도구의 한 가지 적용 예시는 응급 차량에 대한 최적의 네트워크를 찾는 것입니다.
현재 맵 범위 사용을 선택한 경우 현재 맵 범위 내에 보이는 입력 레이어의 위치만 분석되고, 선택하지 않으면 현재 맵 범위 외부에 있는 위치를 포함하여 입력 레이어에 있는 모든 위치가 분석됩니다.
래스터 또는 피처 위치 레이어를 선택하여 다음 간의 이동 경로 결정
최저 비용 네트워크로 연결될 입력 영역입니다.
영역은 이미지 서비스 또는 피처 서비스로 정의할 수 있습니다.
이미지 서비스의 경우 영역은 동일한 값의 인접 셀 그룹으로 정의됩니다. 각 영역에는 고유한 번호가 지정되어야 합니다. 영역의 일부가 아닌 셀은 NoData여야 합니다. 래스터 유형은 정수여야 하며, 값은 양수 또는 음수일 수 있습니다.
피처 서비스의 경우 입력은 포인트, 라인 또는 폴리곤일 수 있습니다.
이동 비용 래스터 레이어 선택
각 셀을 통해 평면으로 이동할 임피던스 또는 비용을 정의하는 래스터입니다.
각 셀 위치의 값은 셀을 통해 이동하기 위한 단가 거리를 나타냅니다. 각 셀 위치 값과 셀 해상도를 곱해 대각선 이동을 보정하여 셀 통과 총비용을 구합니다.
비용 래스터의 값은 정수이거나 부동 소수점일 수 있지만 음수이거나 0일 수는 없습니다(비용이 음수이거나 0일 수 없음).
결과 최적 경로 폴리라인 레이어 이름
내 콘텐츠에 생성되고 맵에 추가되는 레이어의 이름입니다. 기본 이름은 도구 이름과 입력 레이어 이름을 기반으로 합니다. 레이어가 이미 있는 경우 다른 이름을 입력하라는 메시지가 나타납니다.
결과 저장: 드롭다운 상자를 사용하여 결과가 저장될 내 콘텐츠에서 폴더 이름을 지정할 수 있습니다.
결과 인접 경로 폴리라인 레이어 이름
내 콘텐츠에 생성되고 맵에 추가되는 레이어의 이름입니다. 기본 이름은 도구 이름과 입력 레이어 이름을 기반으로 합니다. 레이어가 이미 있는 경우 다른 이름을 입력하라는 메시지가 나타납니다.
결과 저장: 드롭다운 상자를 사용하여 결과가 저장될 내 콘텐츠에서 폴더 이름을 지정할 수 있습니다.