래스터 분석 도구에서는 ArcGIS Image Server를 사용하여 대형 래스터 데이터셋을 분석할 수 있습니다. 또한 서버의 성능을 활용하여 데이터를 좀 더 빠르게 분석할 수 있습니다. 현재 Portal for ArcGIS 웹 UX에서 제공되는 도구집합은 데이터 요약, 패턴 분석, 인접도 사용, 이미지 분석, 터레인 분석, 데이터 관리, 딥러닝입니다.
데이터 요약
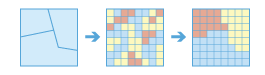
이 도구모음에는 정의하는 영역 경계 내의 래스터 레이어에 대한 일부 통계를 계산하는 도구가 포함되어 있습니다.
- 다음 범위 내 래스터 요약 - 정의된 영역 경계 내에 속하는 래스터 셀에 대한 통계를 계산합니다.
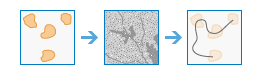
다음 범위 내 래스터 요약(Summarize Raster Within) |
|
정의된 영역 내의 래스터 셀에 대한 일부 요약 통계를 계산합니다.
다음과 같은 몇 가지 적용 예가 있습니다.
- 유역 영역 레이어와 고도 래스터 레이어가 주어진 경우 각 유역 내의 고도 범위를 계산하여 유량 에너지가 최고인 유역을 확인합니다.
- 관리 단위 레이어와 토지 이용 범주의 래스터 레이어가 주어진 경우 각 관리 영역 내의 다양한 토지 이용 값을 계산하여 관리 계획을 세우는 데 가장 많은 작업을 해야 하는 관리 영역을 확인합니다.
패턴 분석
이러한 도구는 데이터에 있는 공간 패턴을 식별, 수량화 및 시각화합니다.
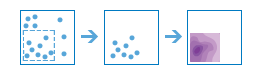
- 밀도 계산은 일부 현상의 알려진 수량을 이용하여 이러한 수량을 맵에서 분산시켜 밀도 맵을 생성합니다.
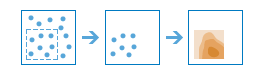
- 포인트 내삽은 포인트 컬렉션에서 발견된 측정을 기반으로 한 새 위치에서 값을 예측합니다.
밀도 계산(Calculate Density) |
|
밀도 분석은 일부 현상의 알려진 수량을 이용하여 이러한 수량을 맵에서 분산시켜 밀도 맵을 생성합니다. 이 도구를 사용하여 낙뢰 또는 토네이도, 보건 시설로의 접근성 및 인구 밀도 등을 표시할 수 있습니다.
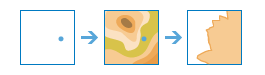
포인트 보간(Interpolate Points) |
|
이 도구를 이용하면 여러 포인트에서 발견된 측정값을 기반으로 새 위치에서의 값을 예측할 수 있습니다. 이 도구는 각 포인트에서 값이 있는 포인트 데이터를 가져가 예측 값으로 분류된 영역을 반환합니다. 이 도구를 사용하여 개별 우량계에서 수행된 측정을 기반으로 하천에서 강우량 수준을 예측할 수 있습니다.
인접도 사용 (Use Proximity)
공간 분석에서 가장 많이 제기되는 일반 질문 중 하나인 "무엇과 무엇이 인접합니까?"라는 질문에 대한 답을 찾는데 사용하는 도구입니다.
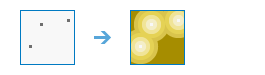
- 거리 계산은 하나 또는 여러 원본으로부터의 유클리드 거리, 방향 및 할당을 계산합니다.
- 최적 이동 비용 네트워크 결정은 입력 영역 집합으로부터의 최적 비용 네트워크를 계산합니다.
- 폴리라인으로의 이동 비용 경로 결정은 원본과 알려진 목적지 간의 최저 비용 폴리라인 경로를 계산합니다.
거리 계산(Calculate Distance) |
|
하나 또는 여러 원본으로부터의 유클리드 거리, 방향 및 할당을 계산합니다. 이 도구를 사용하여 위치에서 도로, 건물 또는 공원까지의 거리를 결정합니다. 가장 직접적인 방법으로 위치에서 원본으로 돌아가야 하는 방향을 결정할 수도 있습니다. 가장 가까운 원본인 연구 영역의 모든 위치를 볼 수 있습니다.
최적 이동 비용 네트워크 결정(Determine Optimum Travel Cost Network) |
|
입력 영역의 집합으로부터의 최적 비용 네트워크를 계산합니다.
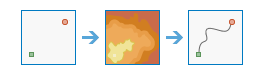
폴리라인으로의 이동 비용 경로 결정 |
|
원본과 알려진 목적지 간의 최저 비용 폴리라인을 계산합니다.
이미지 분석(Analyze Image)
다음 도구는 이미지를 분석하는 데 유용합니다.
- 래스터 함수 템플릿 적용은 래스터 함수 템플릿에서 지정한 대로 이미지를 함수 체인으로 처리합니다.
- 식생 모니터링은 밴드에 대한 산술 연산을 기반으로 이미지 내의 식생을 감지합니다.
래스터 함수 템플릿 적용 |

|
래스터 함수 템플릿에서 지정한 대로 이미지를 함수 체인으로 처리합니다.
식생 모니터링(Monitor Vegetation) |

|
멀티밴드 래스터 레이어 밴드에 대해 산술 연산을 수행하여 처리 범위의 식생 커버리지 정보를 나타냅니다.
지형 분석(Analyze Terrain)
이러한 도구는 래스터 표면을 분석하도록 도와줍니다.
- 경사 계산은 지형의 기울기를 계산합니다.
- 경사면 방향 취득은 각 위치에서 가장 가파른 경사의 방향을 계산합니다.
- 가시권역 생성은 경관의 모든 포인트에서 볼 수 있는 항목을 식별합니다.
- 유역은 표면에서 식별된 위치 위의 기여 영역을 계산합니다.
경사 계산(Calculate Slope) |

|
입력 고도 데이터의 경사를 보여주는 표면을 식별합니다. 경사는 각 수치 표고 모델(DEM) 셀에 대한 고도의 변경율을 나타냅니다.
경사면 방향 취득(Derive Aspect) |

|
이웃 각 셀에서 값 변화의 최대 속도의 내리막 방향을 확인합니다. 경사면 방향은 경사 방향으로 생각할 수 있습니다.
가시권역 생성(Create Viewshed) |
|
관찰자 집합이 볼 수 있는 래스터 표면의 위치를 결정합니다.
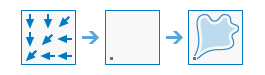
유역(Watershed) |
|
래스터의 셀 집합 위에 기여 영역을 결정합니다.
데이터 관리
지리 데이터의 일상적인 관리 및 분석 전 데이터 통합에 사용되는 도구입니다.
- 래스터 추출 - 향후 분석을 위해 래스터 데이터셋에서 일부를 클립합니다.
- 값 리맵 - 다른 값을 래스터 셀에 할당합니다.
- 피처를 래스터로 변환 - 벡터 데이터를 래스터화합니다.
- 래스터를 피처로 변환 - 래스터 데이터를 벡터화합니다.
래스터 추출(Extract Raster) |

|
다른 데이터셋의 값, 쉐이프 또는 범위를 기반으로 래스터에서 셀을 추출합니다.
값 재배치(Remap Values) |

|
개별 셀 값 또는 일련의 셀 값을 새 값으로 변경합니다.
피처를 래스터로 변환 |
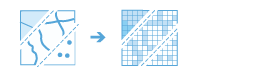
|
기존 피처 데이터셋에서 새 래스터 데이터셋을 생성합니다.
래스터를 피처로 변환 |
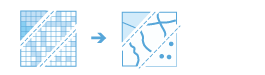
|
기존 래스터 데이터셋에서 새 피처 데이터셋을 생성합니다.
딥러닝 도구집합
이러한 도구는 이미지의 특정 피처를 감지하거나 래스터 데이터셋의 픽셀을 분류하는 데 사용됩니다. 딥러닝은 인공 지능 머신 러닝 방법의 유형으로, 각 레이어가 하나 이상의 고유한 피처를 이미지에서 추출할 수 있는 신경망에서 다중 레이어를 사용하여 이미지의 피처를 감지합니다. 이러한 도구는 TensorFlow, CNTK, Keras와 같은 서드 파티 딥러닝 프레임워크의 특정 피처와 결과 피처, 클래스 맵을 감지하도록 교육된 모델을 사용합니다.
- 딥러닝을 사용하여 픽셀 분류는 숙련된 딥러닝 모델을 사용하여 분류된 래스터를 생성합니다.
- 딥러닝을 사용하여 객체 감지는 숙련된 딥러닝 모델을 사용하여 입력 래스터에서 찾는 객체를 포함하는 피처 클래스를 생성합니다.
딥러닝을 사용하여 픽셀 분류(Classify Pixels Using Deep Learning) |

|
Runs a trained deep learning model on an input raster to produce a classified raster, with each valid pixel having a class label assigned.
딥러닝을 사용하여 객체 감지(Detect Objects Using Deep Learning) |

|
Runs a trained deep learning model on an input raster to produce a feature class containing the objects it finds. The features can be bounding boxes or polygons around the objects found, or points at the centers of the objects.