ポイント クラスターの検索
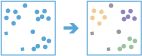
このツールは、空間分布に基づき周辺ノイズ内でポイント フィーチャのクラスターを検索します。
[現在のマップ範囲を使用] をオンにすると、現在のマップ範囲内にある入力ポイント レイヤーのフィーチャだけが解析されます。オフの場合、入力ポイント レイヤーのすべてのフィーチャが、現在のマップ範囲内になくても解析されます。
クラスターの検索対象となるレイヤーを選択します。
クラスターが検出されるポイント レイヤー。
クラスターと見なす最小ポイント数
クラスターと見なされるフィーチャの最小数。フィーチャ数が指定した数よりも少ないクラスターはノイズと見なされます。
検索範囲を設定 (オプション)
フィーチャを同じクラスターの一部と見なす最大距離。空白のままにすると、ツールは HDBSCAN を実行します。これは、さまざまな距離を使用し、密度の異なるクラスターをまばらなノイズから分離します。値が指定されている場合は DBSCAN が実行されます。これは、指定した距離を使用して、密度の高いクラスターをまばらなノイズから分離します。
結果レイヤー名
これは、 [マイ コンテンツ] で作成され、マップに追加されるレイヤーの名前です。デフォルト名は、ツール名と入力レイヤー名に基づいて設定されます。レイヤー名がすでに存在する場合は、別の名前を指定するよう求められます。
[出力の保存先] ドロップダウン メニューを使用して、結果を保存する [マイ コンテンツ] 内のフォルダーの名前を指定できます。