Pronađi klastere točaka
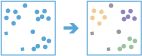
Ovaj alat pronalazi klastere točkastih geoobjekata unutar okolnih podataka na temelju njihove prostorne distribucije.
Ako je označena opcija Upotrijebi trenutačni obuhvat karte, analizirat će se samo geoobjekti u ulaznom točkastom sloju koji su vidljivi unutar trenutačnog obuhvata karte. Ako opcija nije označena, analizirat će se svi geoobjekti u ulaznom točkastom sloju, čak i ako se nalaze izvan trenutačnog obuhvata karte.
Izaberite sloj za koji će se pronaći klasteri
Točkasti sloj gdje se nalaze klasteri.
Minimalni broj točaka koji će se smatrati klasterom
Minimalni broj geoobjekata koji se mogu smatrati klasterom. Svi klasteri s manje geoobjekata nego što je navedeno neće se razmatrati.
Ograniči raspon pretraživanja na (neobavezno)
Maksimalna udaljenost da bi se geoobjekti smatrali dijelom istog klastera. Ako se ostavi praznim, alat će pokrenuti HDBSCAN koji upotrebljava razne udaljenosti za razdvajanje klastera različitih gustoća od manje buke. Ako se navede vrijednost, alat će pokrenuti DBSCAN koji upotrebljava određenu udaljenost za razdvajanje gustih klastera od manje buke.
Naziva sloja rezultata
Ovo je naziv sloja koji će se stvoriti u dijelu Moj sadržaj i dodati karti. Zadani naziv temelji se na nazivu alata i nazivu sloja unosa. Ako naziv sloja već postoji, od vas će se zatražiti da unesete drugi naziv.
Upotrebom padajućeg izbornika Spremi rezultat u možete odrediti naziv mape u dijelu Moj sadržaj gdje će se spremiti rezultat.